








造众城,哀(I)其不争,一(E)路艰辛,舍(S)死(S)逢生?")

历史级「超级跑车」")











撰文:徐鸿鹄 | 排版:王晓峰 |编辑:芃娘娘
公众号:几何四驱 (ID: GeometryAWD)
「请给我一支烟的时间」
科技是有偏好的,决定科技发展动态的物理定律和数学原理会青睐某些特定的行为。过去200年里,人类最伟大的发明是科学流程自身,而非某个特定的产品。今天,一项科技问世后,我们需要约十年时间才能对其意义和用途建立社会共识。日新月异的高科技板块下是缓慢的流层,数字世界的根基被锚定在物理定律,比特信息于网络特性当中。无论何种地域,何种政体,这些基本成分都会一次又一次地孕育出相似的结果。
— 凯文·凯利
”
很多人都在思考,无人车上路的前提条件究竟是什么?
有行业专家说,只要自动驾驶的安全水平能超越统计意义上人类司机驾驶的安全水平,无人车这项技术就是值得推广的。
如果我们用数字来讨论这个问题,在伊隆·马斯克的字典里,这被称之为「第一性原理」。
⚠ 「第一性原理」最早来自于古希腊哲学家亚里士多德。对此,马斯克是这样说的:“我们运用第一性原理,而不是比较思维去思考问题是非常重要的。我们在生活中总是倾向于比较,对别人已经做过或者正在做的事情我们也都去做,这样发展的结果只能产生细小的迭代发展。第一性原理的思想方式是用物理学的角度看待世界,也就是说一层层拨开事物表象,看到里面的本质,再从本质一层层往上走。”
2015年,美利坚纽约市对外公布了其出租车运营的统计数据,13437台出租车*平均7万英里/年运营里程 = 9.41亿英里总里程内,总共发生了7例严重交通事故(致死或致伤),平均每1.34亿英里发生一例。
▼ Fatal and Critical Injury data/ NYC Local Law 31 of 2014

如果我们假定这7例严重交通事故都是独立发生,相互之间没有关联的话,那么我们就可以通过概率模型来估算无人车达到同样的安全水平,需要达成的无故障行驶里程。
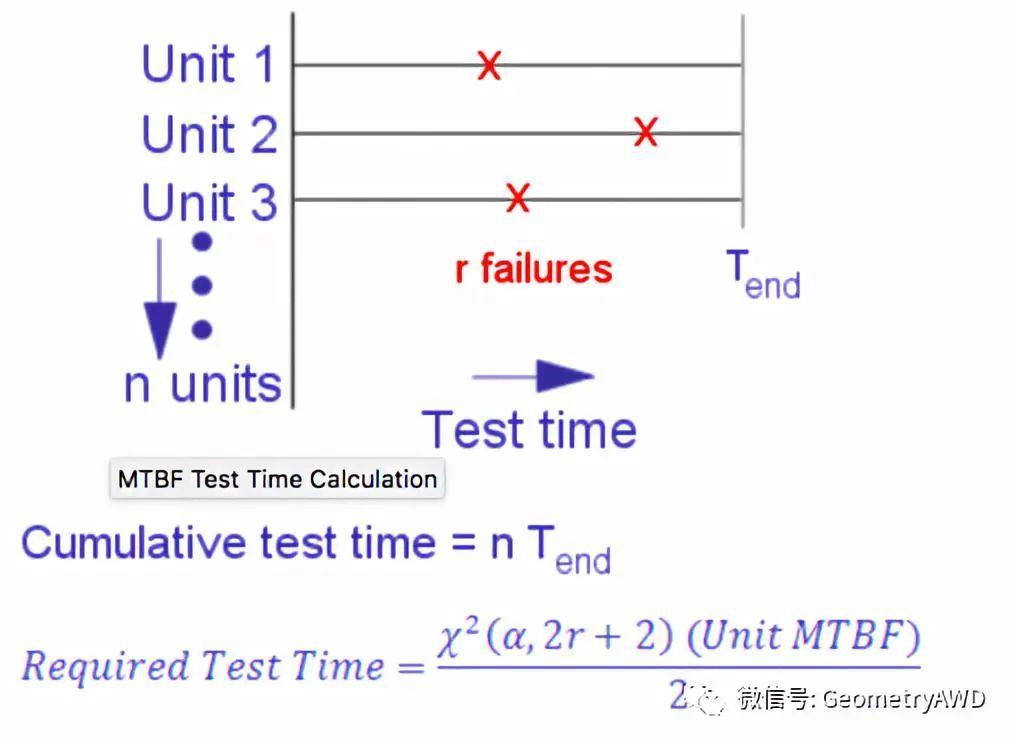
跟随此思路,我在网上找来一个计算器,尝试来评估「无人车」的平均无世故时间(MTBF): https://goo.gl/bubrCY
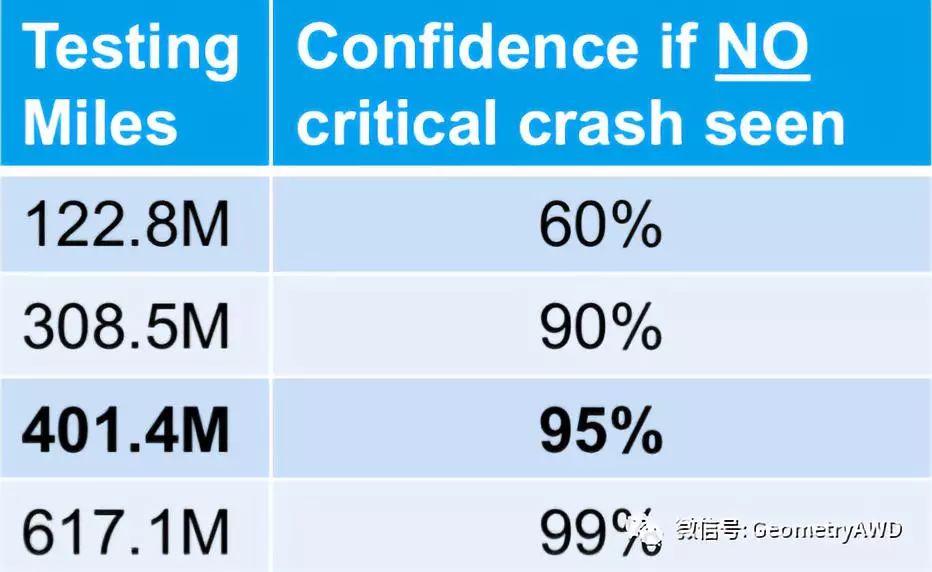
计算发现,对于「无人车」来说,基于95%的置信度(概率上的结论可信程度)下要达到4亿英里的无事故测试里程,我们才能认为无人车刚好达到人类驾驶员的平均事故水平(1.34亿英里)
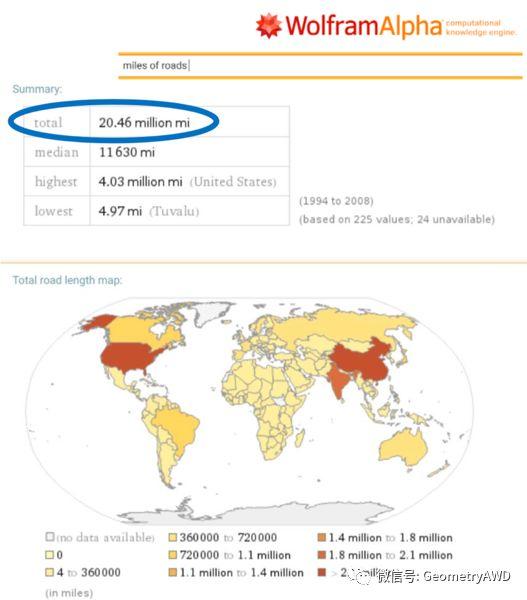
4亿英里究竟是个什么概念?
问问无所不知的Wolfram就知道了:原来整个地球上的公路里程只有2046万英里。
换句话说,为了知道「无人车」是否真的比人类更厉害,我们需要给无人车队安排20趟环球之旅。如果这个车队只开一辆车的话,他们要不停的跑上5000多年!
▼ WolframAlpha
美国著名智库RAND公司也做了一个数学模型来思考这个问题:
▼ RAND
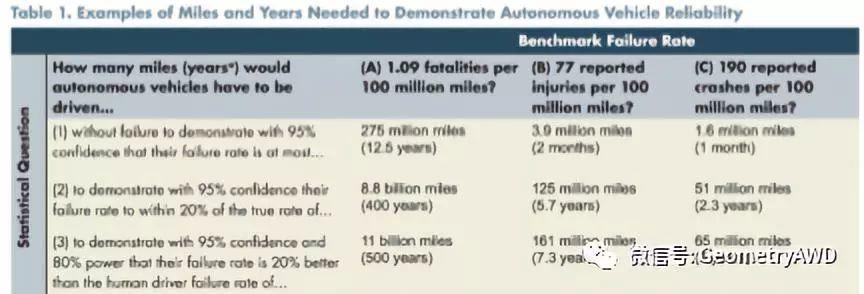
再换句话说:为了证明「无人车技术」比人厉害,我们需要一支500辆次规模的无人测试车队,而且他们需要马不停蹄的连续跑上300年之久!最关键是,还不能出现一起事故,否则里程还要继续增加!
或许,真到了那一天,人类都开始实施星际殖民了![]() ,但我们的无人车队还在路上吃土呢
,但我们的无人车队还在路上吃土呢![]() 。— 按照钢铁侠马斯克最乐观的估计,在SpaceX全新星际运输系统的助力下,在5年内火星就将开始出现人类首批常住民了
。— 按照钢铁侠马斯克最乐观的估计,在SpaceX全新星际运输系统的助力下,在5年内火星就将开始出现人类首批常住民了![]() 。
。

更让人悲观的是,现役全球最大的「无人车车队」— Waymo 在最近的三个月才实现了100万英里的路试里程增量。110亿英里?这简直是个遥不可及的目标!
不过,2018年年中,Waymo宣布了一项雄心勃勃的计划 - 在克莱斯勒和捷豹的新车到位后,它的无人车队将急速扩充到至少8万辆的规模。如果这个计划得以实现,这将能够大大加速测试验证,完成110亿英里里程的测试时间将预计被压缩为火星殖民发射窗口的间隔时间:2年以内 !

是的,留给地球人的时间,不多了!![]()
就在几天前,Waymo又放出消息说,如今他们的无人车队正以每天绕地球赤道一圈的速度刷新里程记录(每天2.5万英里),但是抱歉啊,这也实在还是太慢了!
对此,Tesla的粉丝对Waymo的成就则不以为然:
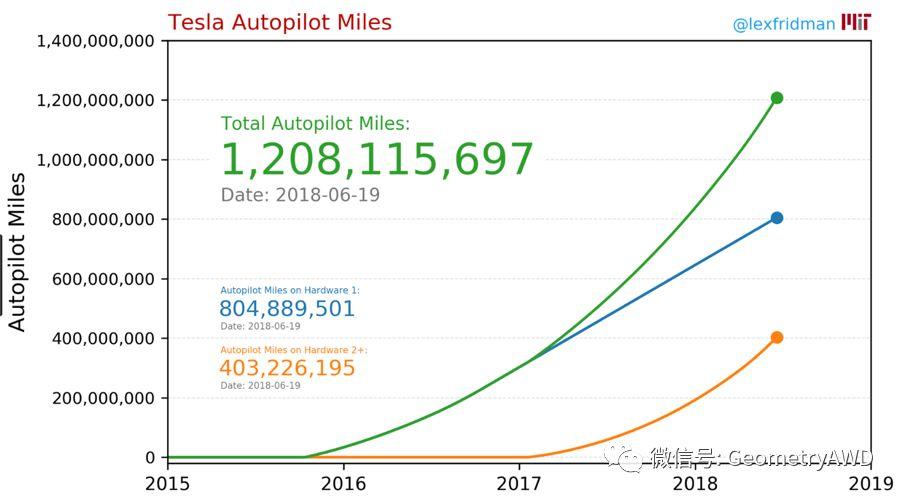
▼ Tesla Autopilot Miles已经在2018年中达到12亿英里了!
▼ Tesla Roadster成为第一辆“太空跑车”
按照RAND的目标里程来看,Tesla的任务完成度已经达到10%。马斯克的Tesla无人车和他的SpaceX火星移民计划正同时在与时间赛跑,争夺第一名!
随后Tesla炫耀式的言论立刻遭到了Waymo的直接反击:
钢铁侠怎么能容忍这种诋毁呢,他没多久就再次高调发声:
Waymo则又深沉地怒怼回应:
科技媒体The Verge也跟着泼冷水说:
口水战似乎更有看头。
而那些首批尝鲜却经常出事的特斯拉车主们却更加迷茫了!
作为地球主义份子的我,在每一个晴朗无月的晚上,在一个适合观星的地方,抬头望见漫天的星辰,总是心有所想,我一直在思考着那件及其重要的事情:「无人车」何时会真正地到来? 坐在「无人车」上仰望地球的星空真的就遥不可及么?
后来有人告诉我说,美国有一个叫做Gartner的咨询公司,它们在研究了一系列技术的发展历史后,画出了一个关于技术发展趋势的曲线,据此可以预判一项技术的成熟度。这个公司内部叫它Hype Cycle,这条曲线有一个神奇的作用,它可以缓解科技主义者们苦苦等待的焦虑情绪。
2017年绘制的曲线是长这个样子的:
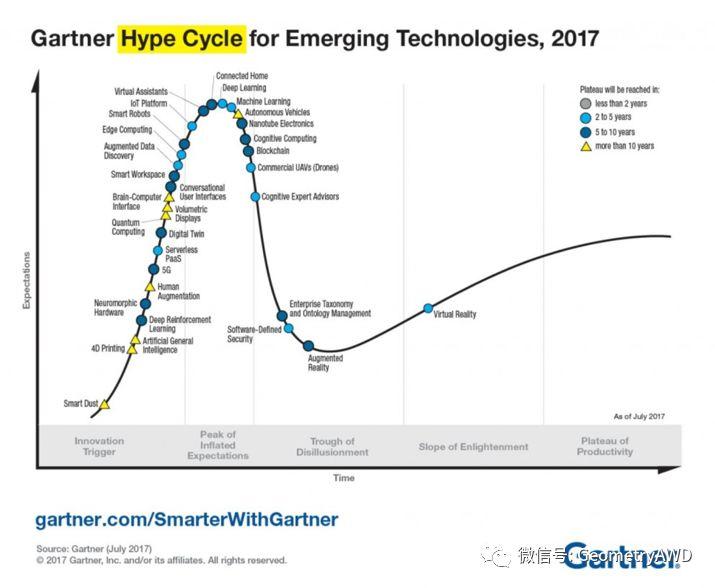
「无人车」就处在曲线里极盛的第二阶段,这个神奇的概念被炒的火热,人们对于技术的落地期望因此也变得非常之高。
按照Gartner的预测,越是吵闹的话题,被遗忘得也越快,它们从而会加速进入第三个阶段的低谷期。就像前几年前被热炒的VR技术,最近感觉稍稍沉寂了一些。而这个沉寂的低谷就是“理想破灭”导致的。别说从业者了,就连做风险投资的人都避之不及。
硅谷最特立独行的人,马斯克最钦佩的朋友,彼得·泰尔最爱说的一句话便是:“我不喜欢投资趋势”。
▼ 彼得·泰尔 - 硅谷传奇企业家,风险投资家,对冲基金经理

他还怕自己说的不够明确,于是继续补充道:
“太多的公司都在做自动驾驶技术及其相似产品,很难判别它们之间有什么不同”
“如果你有自动驾驶汽车,你就可以延长你的通勤时间,因为可以在车上工作,同时,你也会减少办公室工作的时间,既然在车上或者在家里都算作远程办公,我们为什么一定要移动呢?”
热词被遗忘之后就是一个漫长的涅槃重生的过程:
应用的场景开始细分,产品也改变了形象,话题的受众也开始缩小。
也许在一个大家很少关注的领域里,技术得以落地。
再之后,没有人随意烧钱了,就连公共媒体也都很少谈论了,成熟的技术确不知不觉地一点点渗透进入了寻常百姓家,人们开始享受科技的便利而不自知。
在「无人车」领域,未来的5年我们将有极大的概率进入这个“必然”的下行趋势。
「无人车」的“理想破灭”会有哪些诱因,我们的隐忧又到底是什么呢?
为了窥见「无人车技术」之美,人类必须付出百倍的努力。
「无人车安全」是寄托这份信任的载体,它刺破黑暗的枷只眷顾有准备的人。
安全感是大地,冒险感是天空。人类的冒险精神促动着无人车技术的前行,而无人车作为人类解脱了脑力的移动代步工具,也要支撑起人类对他的这份信任。
「无人车」对我的最大吸引力,来源于它是集大成的产品。在思考它的过程当中,它也教会了我用无数个新角度来看待世界的运行。一连串问题的背后,都包含着至关重要的两个人生信条:
第一:答案在我的脑子里!
第二:他人可以帮助我找到脑子里的答案!
搜寻观点的碰撞,思考开始游弋,意识不断重塑,不停的追问过后答案也渐渐显现。我趁机写下探索到的点点滴滴,记录下触发灵感的每一次心跳,并将其分享给有需要的人。
无人车的安全性一直伴随着各种争议甚至非议。
无人车要想取得人类的信任,是否必须建立起普世的评价标准?就像现在大家都用是否持有驾照来判断一个人是否有资格开车一样,无人车是否也需要通过“驾照考试”来证明自己的能力?
01. 测试里程暗含猫腻,缺失为安全背书的统一标准
02. “感知”和“决策”过程的安全黑洞:机器学习技术缺乏可解释性
03. 执行器 — 科技公司的绝对弱项
04. 测试是蛮力思维,没有完美的尽头
05. L3技术路线复杂程度更高,反而比L4路线难度更大?
06. ”互动安全“崭新的课题,无人车要成为“社交动物”
「无人车」的“考试”似乎要比人类更加苛刻,毕竟这是一部对人的生命权而言至关重要的机器。 以上列出的就是六个跟“安全”相关而又伴随争议和误解的话题,在 续篇 Part2 里,我们的主角故事也将就此展开…
正所谓不破不立,带着批判的眼光思考极具争议观点的同时,我们也更应该关注「无人车安全标准」的制定和最佳安全实践。
制定安全标准,必然要多方博弈,并寻求公平和可操作的体系流程。而最佳安全实践则是先驱者们的无畏探索,在一片荒蛮的土地上求解法律和道德的理想边界,并孕育出技术之花。
在 终篇 Part3 里,我们将为大家回顾美国国家科学院在「无人车安全标准」领域的既有研究成果。但这还不够,面对全新的安全挑战,需要高屋建瓴,引入新的方法论来强化既有安全体系,这包括了以下三个章节:
01. 美国国家科学院无人车安全标准研究
02. 功能安全:ISO 26262—随机硬件失效,系统性失效
03. 预期功能安全SOTIF 以及系统理论过程分析 STPA
最后作为全篇的结尾,我们将会为大家解读四份无人车公司官方发布的安全报告的核心要点,以此来展示各家对于无人车安全的深入思考和理解。
01. Waymo 的系统安全计划 SSP
02. Mobileye敏于责任的安全RSS
03. Voyage 的开放式自主安全OAS
04. 百度Apollo Pilot APC
以上这四家无人车公司均都是行业里的领头羊,在江湖里占有着举足轻重的地位。它们的报告里即有令人拍案叫绝的原创想法,又有思路惊奇的刁钻视角,更有异想天开的有趣探索,如果你也感兴趣,让我们不妨来一探究竟吧!
对待无人车安全,我们不能抱着“久病能成医,常修赛学霸”的消极态度去磨合出一个美好的未来。
我思考得越是持久和深入,它们在我心中唤起的惊奇于敬畏越是不断增长
— 康德
”
如果我们对待安全失去了敬畏之心,就很容易陷入自嗨的境地。我们必须不断反驳自己的观点,并接受那些强有力的反对意见,在观点的碰撞当中寻求新的出路…
特邀撰稿:徐鸿鹄
作者微信:honghu967935
现就职于 蒂森克虏伯 普利斯坦 (Thyssenkrupp Presta) ,负责电动转向系统 (EPS) 应用项目的开发和管理。
航天科班,主业汽车电动转向开发,纯正懒散东北人,王小波脑残粉,个人主义走狗 ,AI威胁论煽动者,民科数学家,半吊子程序狗,沉迷理论,日渐消瘦,无一精通。
更多相关文章推荐
关注「几何四驱」
各种高能文章,随后速速就来

本篇文章内容为作者本人原创,展示图片均来自网络,版权归图片作者本人所有!文章未经「几何四驱」或「作者本人」授权不得进行商业性转载。个人性转载请务必注明文章出处。原创不易,感谢理解!
不跟风,拒绝平庸,只做最好的自己。
「几何四驱」 All made in Germany ,Since 2016!











